한국과학기술연구원(KIST, 원장 이병권) 지능로봇연구단 김기훈 박사팀은 표면 근전도 신호를 이용하여 사람이 시연을 통해 “유연한 로봇”을 학습시키는 방법을 개발하여, 로봇이 마치 축구 선수처럼 떨어지는 공을 트래핑하도록 학습시키는데 성공했다.
최근 등장한 유연한 로봇은 기존의 단단한 로봇과는 다르게 사람의 근육이나 관절처럼 유연한 탄력을 가져 로봇의 새로운 시대를 열었다. 이 유연한 로봇은 마치 사람처럼 달리고, 점프를 하여 장애물을 넘고, 스포츠를 함께 즐길 수 있을 것으로 기대되었다. 그러나 이런 동작이 가능해진 유연한 로봇에게 이런 기술을 가르쳐줄 수 있는 방법은 아직 개발된 바가 없었다.
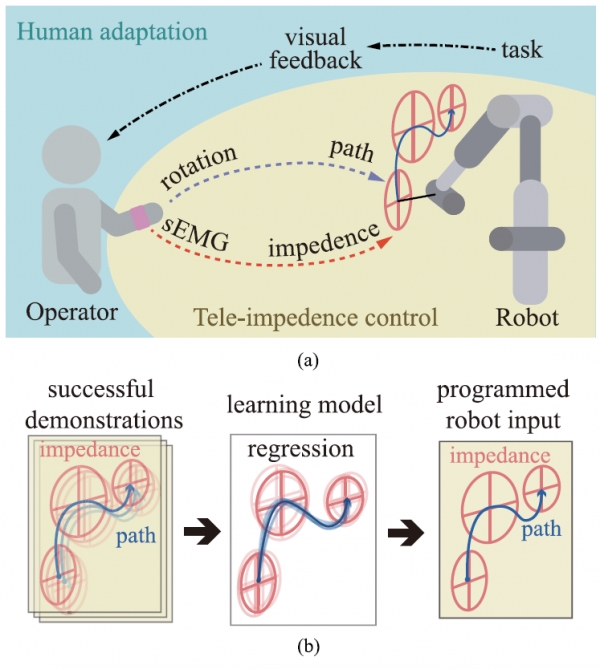
KIST 연구팀은 이런 유연한 로봇에게 사람의 생체 근육 신호를 이용하여 새로운 동작을 직접 가르칠 수 있는 기술을 최초로 개발했다. 사람이 운동을 할 때 발생하는 근육의 전기 신호인 표면 근전도 신호로부터 자세뿐만 아니라 유연성을 함께 측정할 수 있는 기술을 바탕으로, 사람이 운동을 직접 로봇에게 시연하여 가르칠 수 있게 된 것이다.
KIST 김기훈 박사팀은 이를 이용해 로봇이 마치 축구 선수처럼 빠르게 떨어지는 공을 단단한 부분 위에 공이 크게 튀지 않도록 트래핑하는 기술을 학습시키는데 성공했다.
사람의 팔에 표면 근전도 센서를 부착하여 위아래로 빠르게 움직이는 로봇의 위치와 유연성 두 가지를 동시에 제어할 수 있게 하고, 빠르게 떨어지는 공을 보고 사람이 직접 로봇에게 시연하여 트래핑하는 방법을 학습시켰다. 학습된 로봇은 사람 없이도 떨어지는 공을 능숙하게 트래핑하는데 성공하였다.
이번 연구 성과는 유연한 로봇의 작업을 수학적으로 일일히 계획하고 프로그래밍하는 것이 아니라 사람이 직관적으로 직접 학습시킬 수 있어 주목받고 있다. 로봇과 사람의 상호작용을 발전시켜 로봇을 우리의 생활 속으로 한 발짝 더 가깝게 만들 수 있을 것으로 기대된다.