물체를 집는 건 로봇에게 어렵다. 최첨단 로봇도 어린아이가 지닌 운동 능력보다 떨어진다. 사람에게 달걀을 집는 행동은 큰 노력이 필요하지 않다. 그러나 로봇은 다르다. 복잡한 물리적 힘을 계산하며 조작하는 동시에 너무 많은 에너지를 쓰지 말아야 한다. 최근 케임브리지 대학 연구진은 발상을 전환해 해결책을 찾았다.
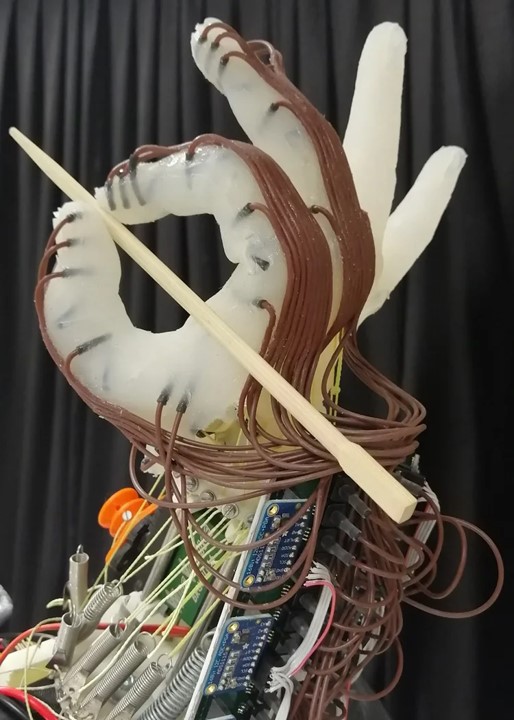
어드밴스드 인텔리전트 시스템즈(Advanced Intelligent Systems)에 12일 게재된 논문은 관절 대신 피부로 작업하는 로봇 손을 소개했다. 인공피부에 내장된 센서로 다양한 물체를 잡는 저비용 로봇 손이다. 피부를 늘이고 줄이는 방식으로 움직인다. 손가락 관절이 필요 없어 물리적 힘을 계산하지 않아도 된다. 설계와 프로그래밍을 간소화하고 에너지를 더 적게 사용한다.
논문 공저자인 후미야 이이다 케임브리지 대학 로봇공학 교수는 "손을 최대한 단순화하려고 했다"며 "(관절을 움직이는) 액추에이터 없이도 데이터를 얻고 기계를 제어한다"고 밝혔다. 이어 "액추에이터를 추가하면 효율적인 구조에서 더 복잡한 동작을 구현할 수 있다"고 덧붙였다.
연구진은 먼저 손목만 움직이는 3D 프린팅 손안에 촉각 센서를 이식했다. 잡는 능력을 연구하기 위해 1천 2백 회 이상 실험했다. 주로 사람 동작을 모방해 작은 플라스틱 공을 집어 올리는 과제였다. 플라스틱 공을 넘어 뽁뽁이, 컴퓨터 마우스, 복숭아까지 집어 올리는 단계까지 발전했다. 논문에서 로봇 손은 14가지 물체 중 11개를 성공적으로 집었다.
키어런 길데이 케임브리지 로봇공학 연구원은 학습 과정을 설명한다. 기계는 손목 동작과 센서가 인식한 신호가 특정 조합을 이룰 때 성공 또는 실패로 이어진다고 깨닫는다. 그는 "손은 단순하지만 같은 동작으로 다양한 물체를 집어 올릴 수 있다"고 강조했다.
단순한 로봇 손은 여러 산업에서 유용하게 사용될 잠재력이 있다. 앞으로 연구자들은 로봇 손을 컴퓨터 시각과 결합해 주변 환경을 인지해서 작업할 수 있기를 바란다.
※이 기사는 popsci.com 원문을 바탕으로 작성됐으며, 번역은 파퓰러사이언스코리아 소속 기자가 도왔습니다.
/ 글 Andrew Paul 기자 & 육지훈 기자