지난달 조지아 공과대학교 연구진들은 지네처럼 생긴 로봇을 공개했습니다. 그저 재미로 절지동물처럼 만들지는 않았습니다. 복잡한 센서 시스템을 단순화하고 까다로운 지형에서 기동력을 향상하기 위해서였습니다.
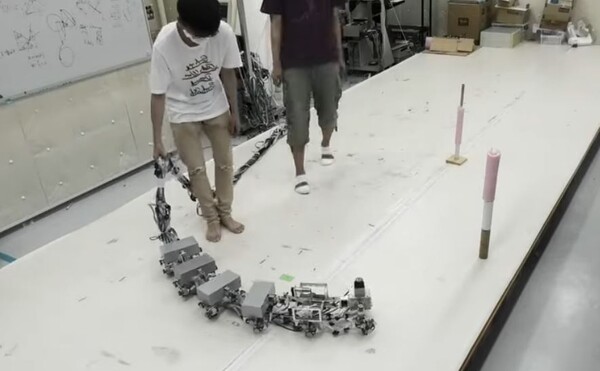
오사카 대학교 기계 과학 및 생명공학부 연구진도 미리아포드(myriapod) 로봇을 선보이며 지네 모방 로봇 행렬에 동참했습니다. 변화무쌍한 자연환경에서 유선형 움직임으로 대응하며 보다 적은 에너지로 이동할 수 있습니다.
소프트 로보틱스(Soft robotics)에 최근 게시된 논문은 로봇을 자세히 설명합니다. 6개 부위로 이루어진 53인치 구조물입니다. 각 부위는 민첩한 관절과 다리 두 개를 가지고 있습니다. 논문의 공동 저자인 아오이 신야 오사카 대학교 연구진은 개발진이 매우 유연한 곤충에서 영감을 얻었다고 밝혔습니다. 역동적으로 움직임과 방향을 빠르게 전환하는 모습에 감명받았습니다.
자연 속 곤충 동작을 모방하기 위해 로봇에 소형 모터를 장착했습니다. 작동하는 동안 나사를 제어해 각 부위의 유연성을 조절하는 역할입니다.
지네 로봇은 전진하며 균형이 불안정해집니다. 힘이 분산되는 '갈퀴 분기(pitchfork bifurcation)'라는 지점입니다. 그러나 전복되며 멈추는 대신 쏠리는 힘을 이용합니다. 분기점에서 받는 힘을 통해 곡선으로 움직입니다. 하나의 동력으로 삼아 다른 보행 로봇보다 적은 에너지로 기동할 수 있습니다.
이족보행 로봇은 인상적이지만 많은 경우 다리가 약하고 고장에 취약합니다. 만약 두 다리 중 하나가 고장 나면 더 이상 작동할 수 없습니다. 지네 로봇은 팔다리 개수가 많아 작은 고장에도 이동하는 동시에 이족보행보다 다양한 지형에서 적응할 수 있습니다. 논문의 공동 저자인 마우 아다치는 "수색, 구조, 위험한 환경 속 작업, 타 행성 탐사 등 다양한 환경에서 응용할 수 있을 것으로 예상한다"고 강조했습니다.
이런 로봇 양식은 여러 과학자에게 주목받고 있습니다. 지난달 NASA는 토성의 위성인 엔셀라두스에서 외계 생명체 흔적을 찾기 위해 외계 생물학 생존 생명체 탐사선(EELS) 로봇을 공개했습니다. EELS는 회전 추진 장치를 사용하며 뱀처럼 움직입니다.
※이 기사는 popsci.com 원문을 바탕으로 작성됐으며, 번역은 파퓰러사이언스코리아 소속 기자가 도왔습니다.
/ 글 Andrew Paul 기자 & 육지훈 기자