7일 파퓰러사이언스는 ‘헤어핀’의 구조에서 힌트를 얻은 독특한 로봇을 소개했다.
미국 컬럼비아대학교 연구팀이 개발한 로봇의 구동장치는 이름도 아예 '헤어클립 메커니즘'(HCM)이다. 대개 자연물에서 따오는 다른 로봇 디자인과는 달리 흔한 미용제품에 착안한 점이 흥미롭다.

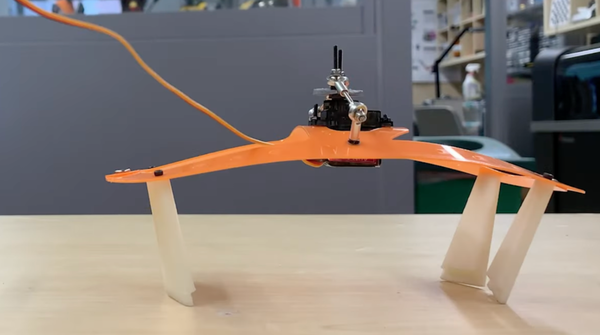
HCM로봇은 강철선이 든 플라스틱으로 만든 작은 로봇으로 기본 전기 서보(servo)가 부착돼 있다. 활성화되면 플라스틱 조각이 오목하고 볼록한 모양으로 번갈아 바뀌면서 움직인다.
연구팀은 물고기 로봇과 평평한 표면을 질주하는 네발 로봇 2가지 버전을 만들어 테스트했다. 물고기 로봇은 초당 최고 435mm 속도로 움직였고, 네발 로봇은 초당 313mm를 기록했다.
아래 영상에서 로봇의 움직임을 확인할 수 있다.
“HCM 로봇에서 특히 흥미로운 점은 로봇의 프레임 자체가 추진 시스템으로 작동한다는 것"이라고 파퓰러사이언스는 설명했다.
위 영상에서 연구팀은 이런 구조를 엔진이 프레임 역할을 하는 자동차, 인체의 근육조직을 두 배로 만드는 골격에 비유했다. 연구팀은 “분리된 모터에 대한 필요성을 없애면 가까운 미래에 더 저렴하고 단순하며 가벼운 로봇을 만들 수 있다”고 밝혔다.
유연한 재질로 만든 로봇은 섬세한 동작을 할 수 있고 창의적인 디자인이 가능하다. 그러면서도 가볍고 경제성이 높아 인기를 얻고 있다.
최근 콜로라도 주립대학교 연구팀이 선보인 로봇 그리퍼(gripper)가 대표적인 예. 극도로 섬세하게 작동해 표면장력을 손상시키지 않고 액체 방울을 잡을 수 있다.

하버드 연구팀에서 발표한 로봇팔도 있다. 유리제품 같은 섬세한 물체를 잡을 수 있는 기다란 촉수가 달려 있다.
